
Autonomous vehicles can now safely weave through dense crowds by “imagining” multiple potential futures for every pedestrian, solving the hesitation issues that plague current urban self-driving systems.
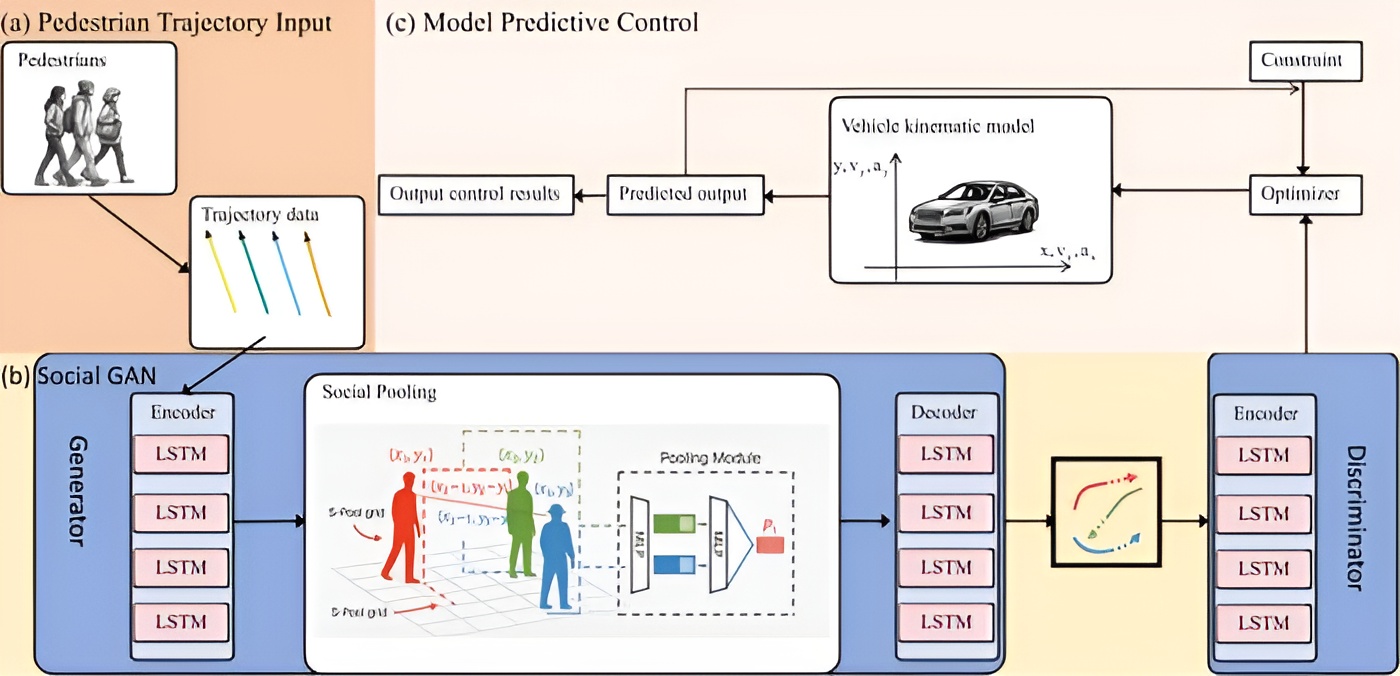
Researchers from Tongji University and Shanghai Jiao Tong University have developed a prediction-to-control pipeline that achieved zero safety violations in dynamic crowd simulations. Unlike traditional models that rely on a single “average” forecast, this system combines a Social Generative Adversarial Network (Social GAN) with a real-time Model Predictive Control (MPC) planner to anticipate complex human behaviours.
Current self-driving systems often struggle in urban spaces, becoming overly cautious or dangerously overconfident when compressing uncertainty into a single prediction. By treating each predicted path — such as a person suddenly stopping, speeding up, or yielding — as a moving obstacle, the new framework allows the vehicle to reason over multiple plausible outcomes instantly.
“In simple terms, the predictor imagines several socially reasonable futures for every pedestrian, and the controller picks a path that stays safe under all of them,” says author Zihan Jiang. “This lets the vehicle negotiate crowded spaces more like a cautious human driver, without needing an excessively complex controller.”
Dense-crowd scenarios
To validate the framework, the team tested the system against standard pedestrian datasets and simulated dense-crowd scenarios. While a simple reactive “emergency-stop” policy struggled, the Social GAN-assisted controller maintained an average clearance of 0.94 metres from the nearest pedestrian.
The safer behaviour came with a minor efficiency trade-off, increasing travel time by approximately 0.8 seconds due to more cautious detours. However, the system met strict real-time computing limits, operating with an average end-to-end latency of 209 milliseconds, well below the 400-millisecond safety threshold.
Although the controller utilises higher acceleration and jerk levels to make proactive adjustments, researchers report that these values remain within accepted comfort limits, ensuring passengers perceive manoeuvres as firm rather than aggressive.



